Replacement Hands, Forearms & Biceps
This section is about Ultron’s version arms and hands. Check out the main project index for the rest.
There are some YouTube videos about this section, or scroll down for the pictures and words.


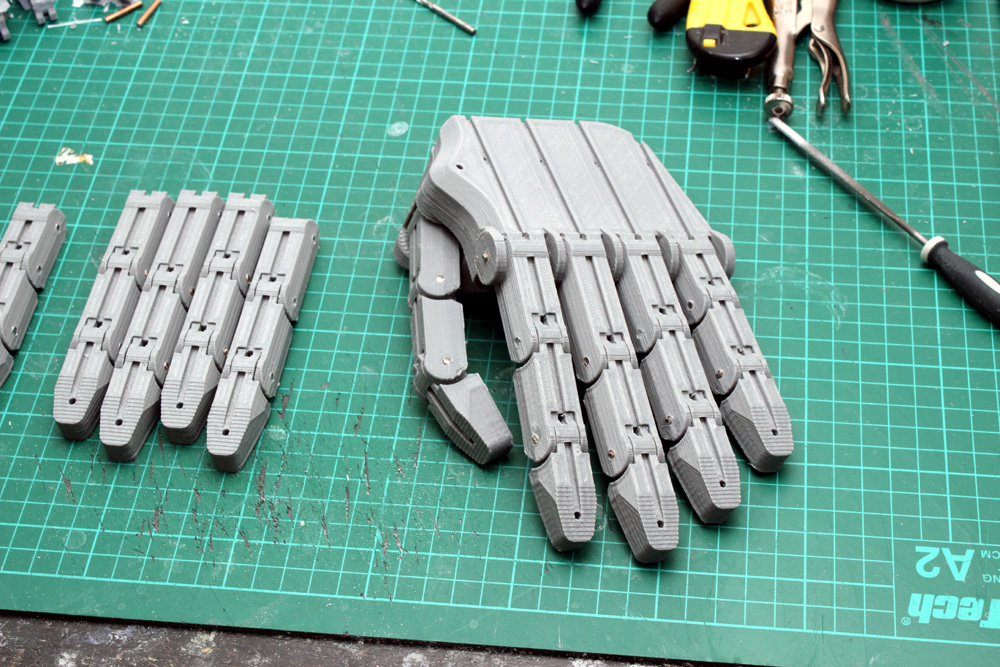
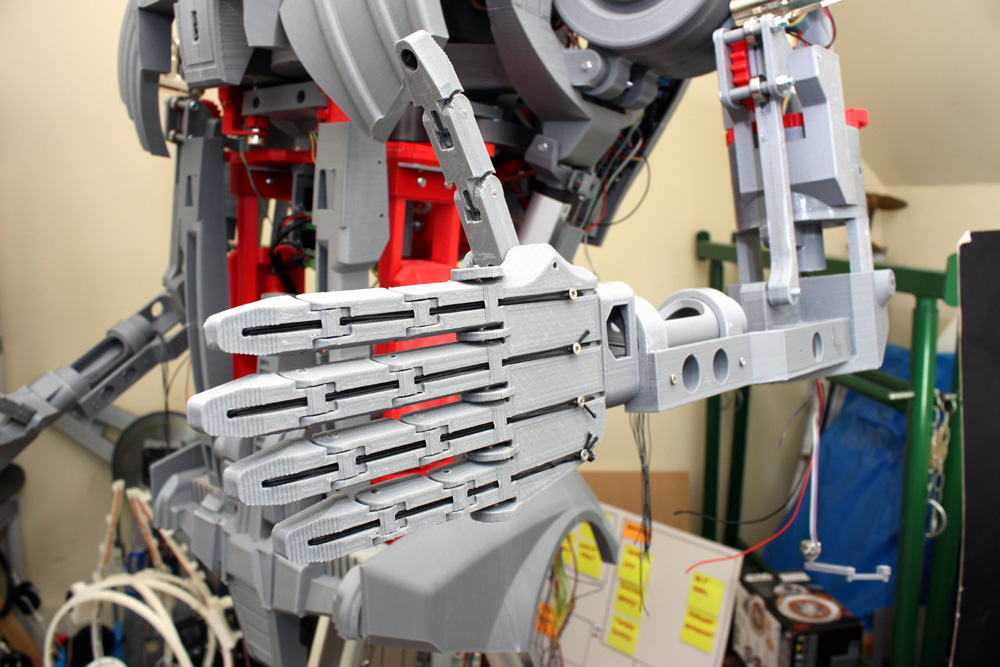
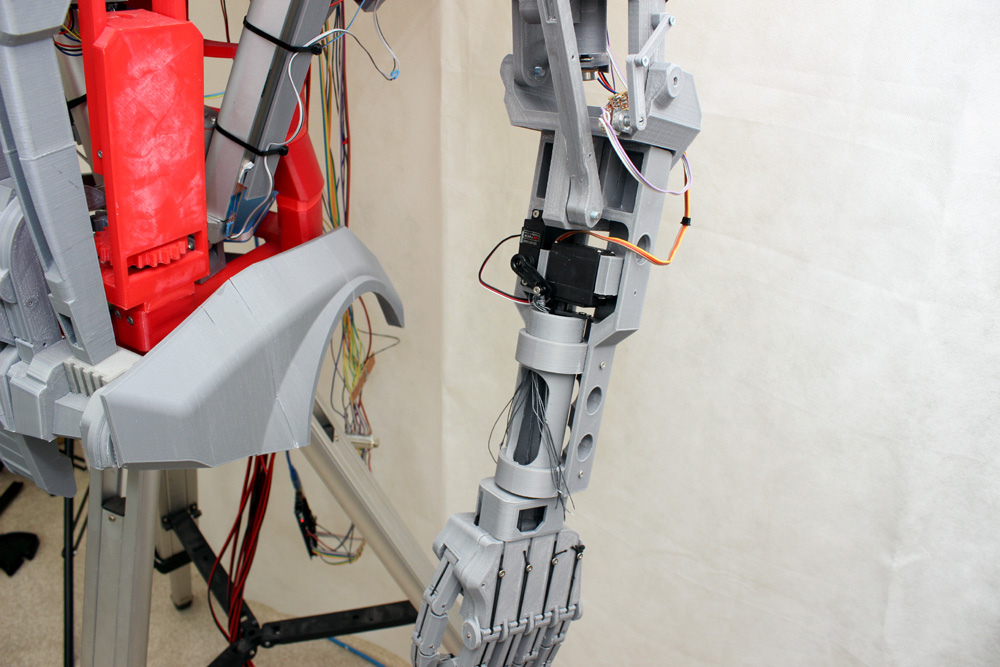
There are quite a few 3D printed hand projects around already, including the Open Hand Project and the Enable Project, however I decided that I would design my own hands. I made a guide channel in the top of the hand so that I could string the fingers back with elastic cord, and use a pull-string on inside of each finger to bend the fingers. I decided to replace the previous forearms which used servo driven motor mixing and just one servo.motor per axis. The hands will rotate and grip, but that’s about it.

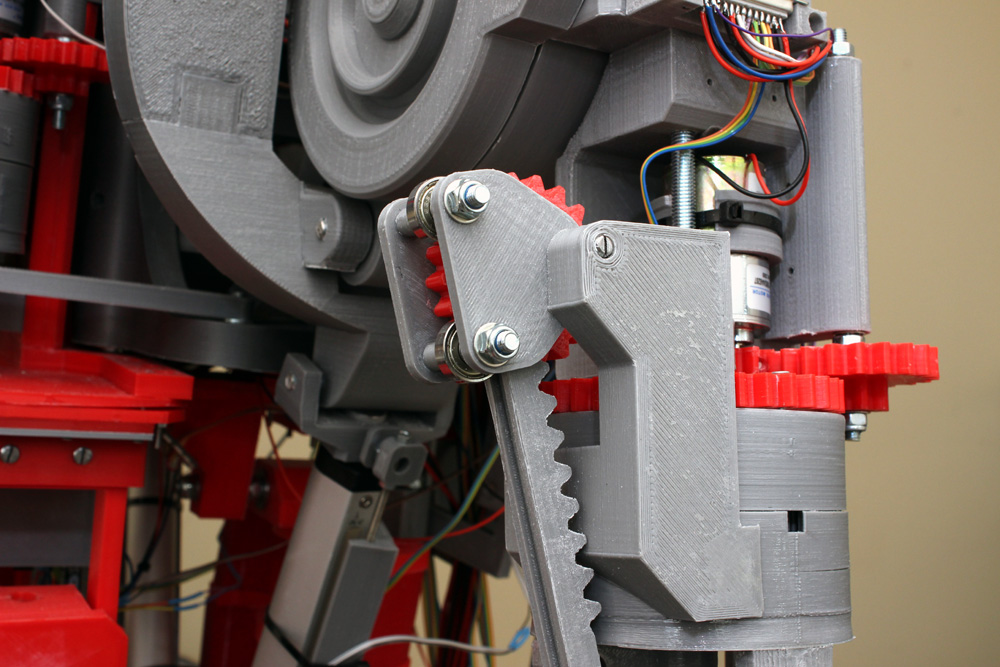
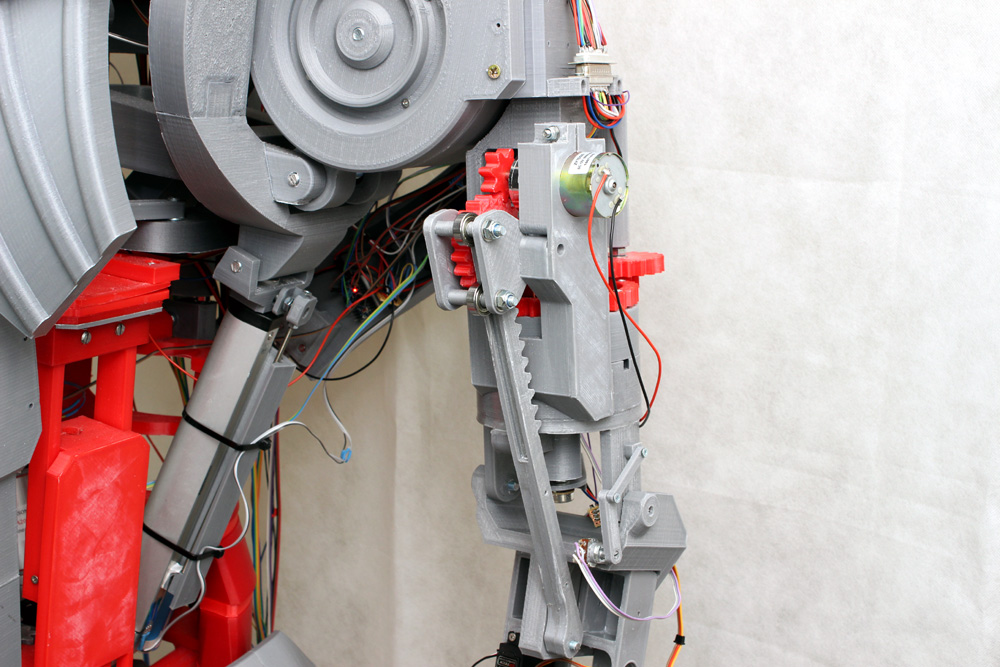
The old bicep was actually in the forearm, so I’ve installed a new rack-and-pinion system to pull the forearm up and down. The motor still needs to be installed. There will of course be cosmetic coverings once everything is in place.
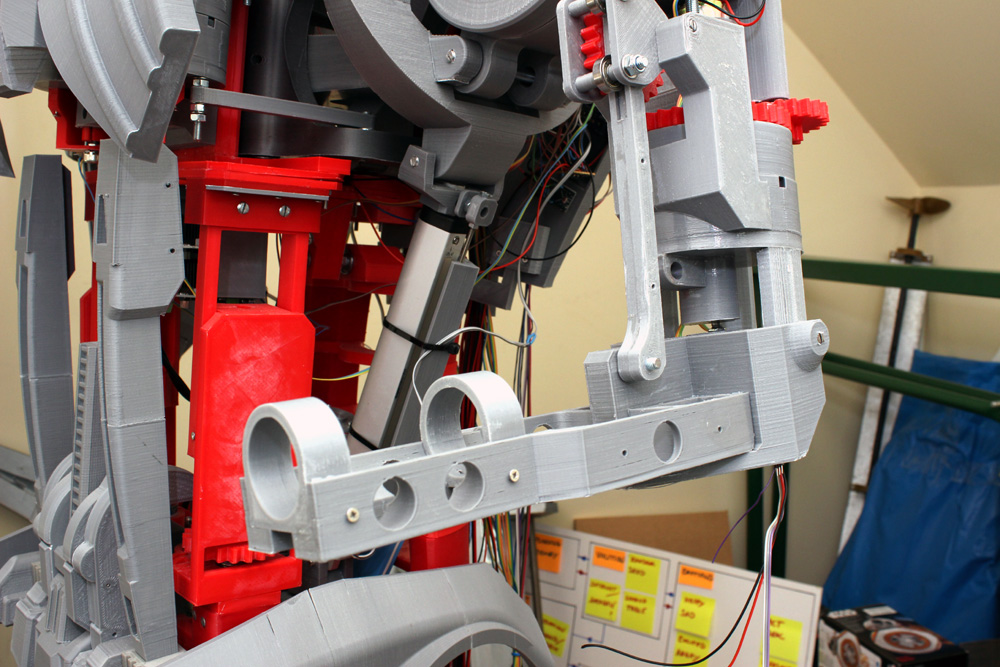
I’ve installed motors for the bicep motion as well as wrist rotation and hand gripping, check out the video above for more info.





About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More