Arm Assembly
Project Ultron – A Real Robot!
This page is about the arm asembly, check out the main project index for the rest.
There are some YouTube videos about this section


The upper arms are the same gearing and partial assembly as the shoulder front/back axis. This is so they can both run together at the same speed:
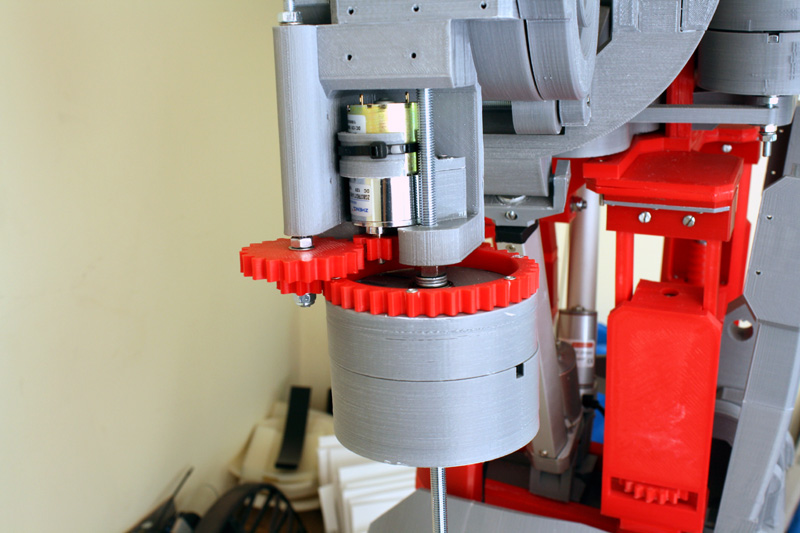

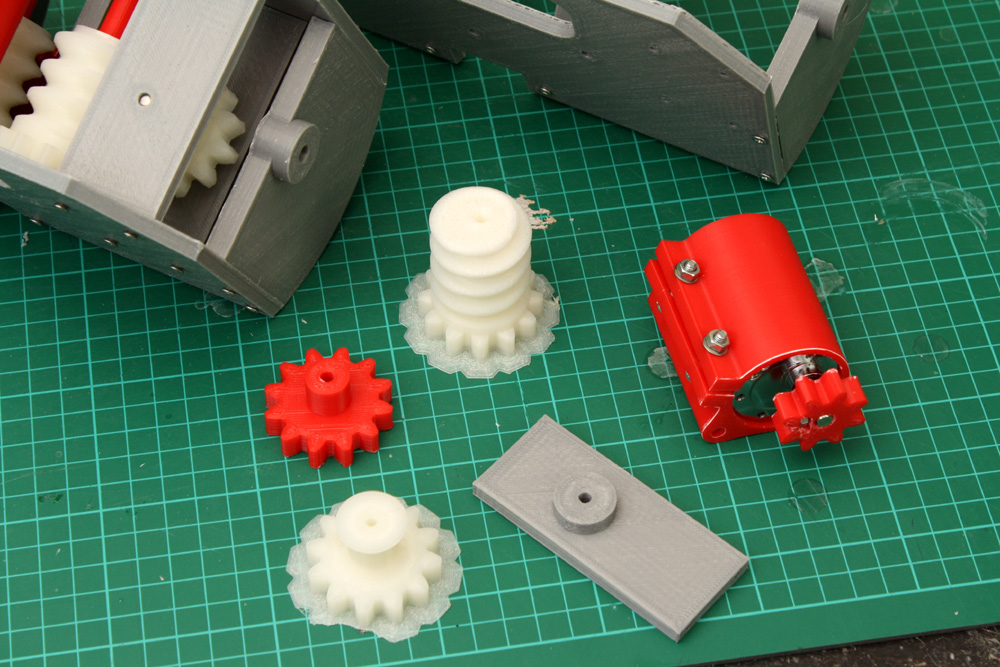
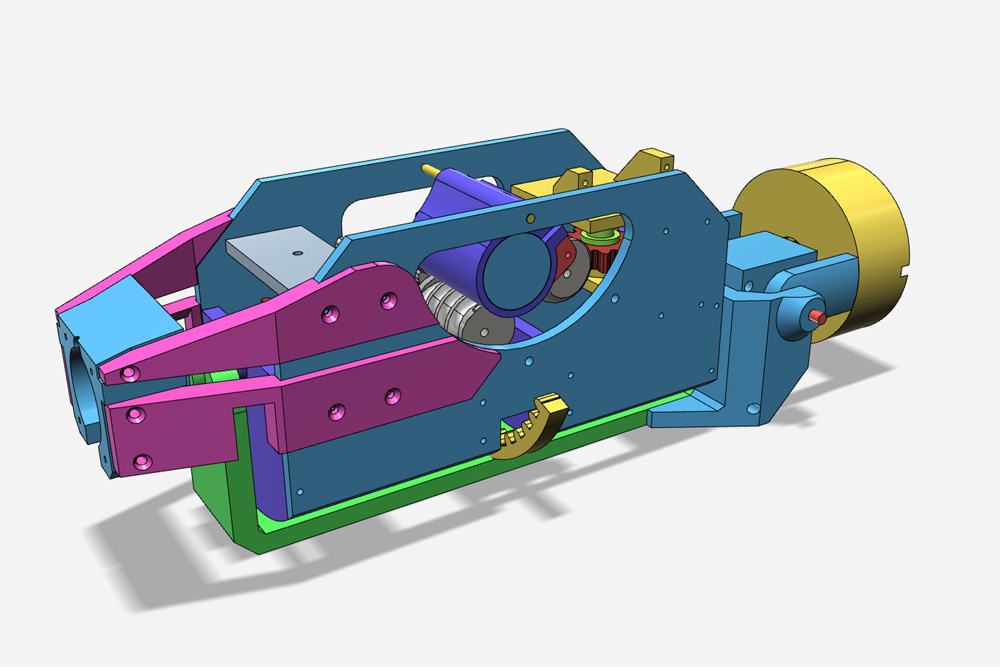
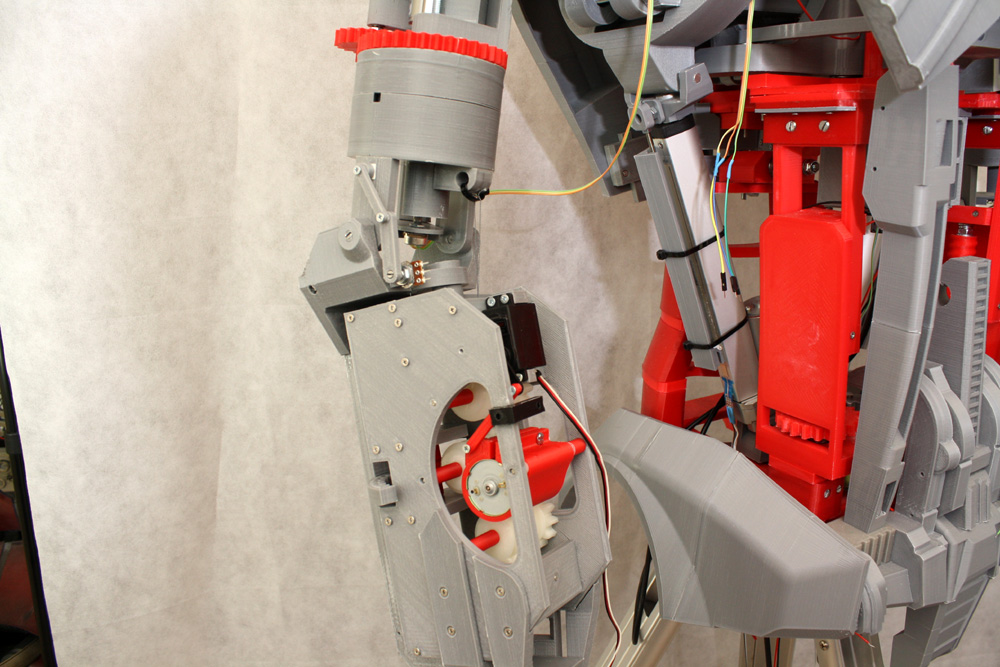
I’ve designed a gearbox assembly for the forearm which allows one motor to switch between several outputs:
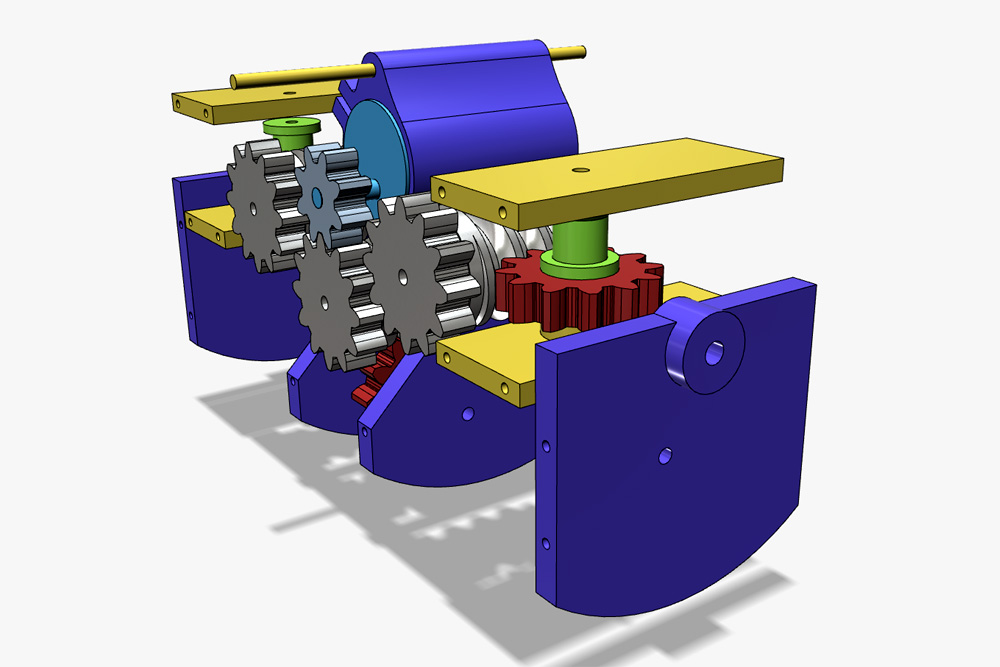
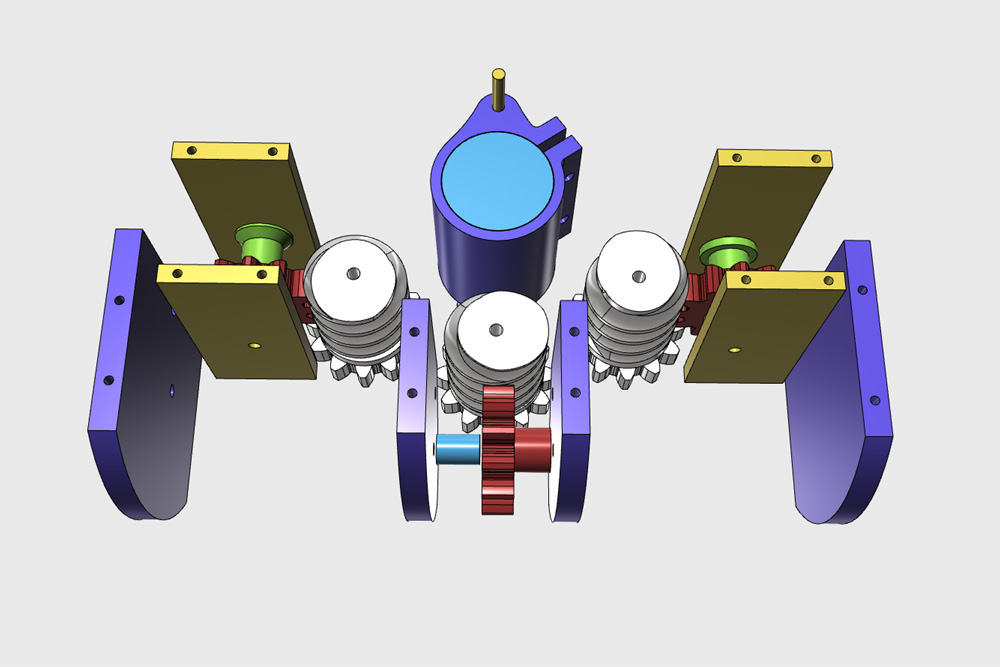
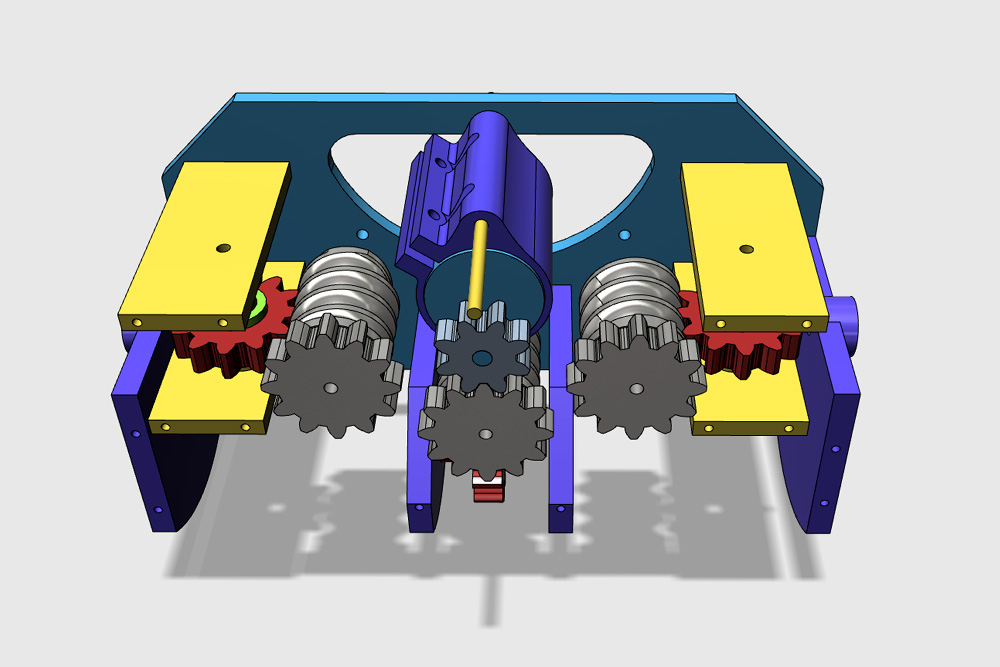
The worm gears are printed in Taulman Alloy 910 and the rest of the gears are ABS. The motor will be driven back and forth with a servo so that it can engage with any of the three worm gears – these will drive the hand, elbow, and wrist rotation:
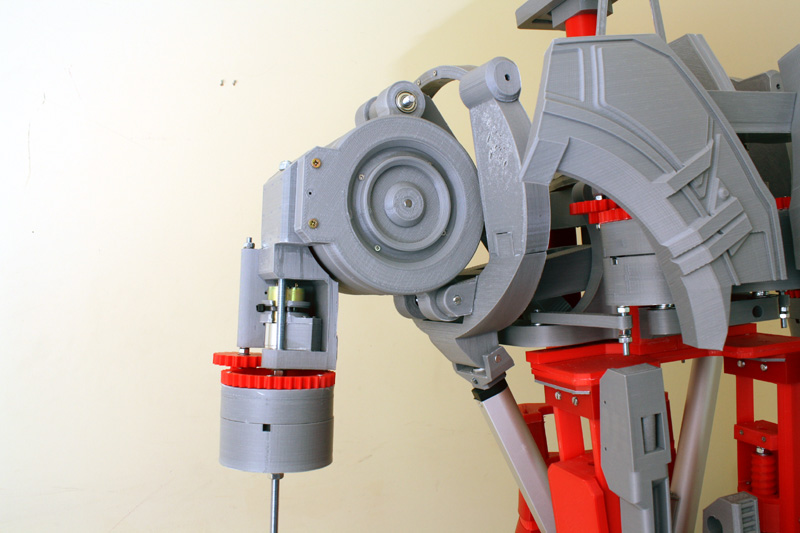
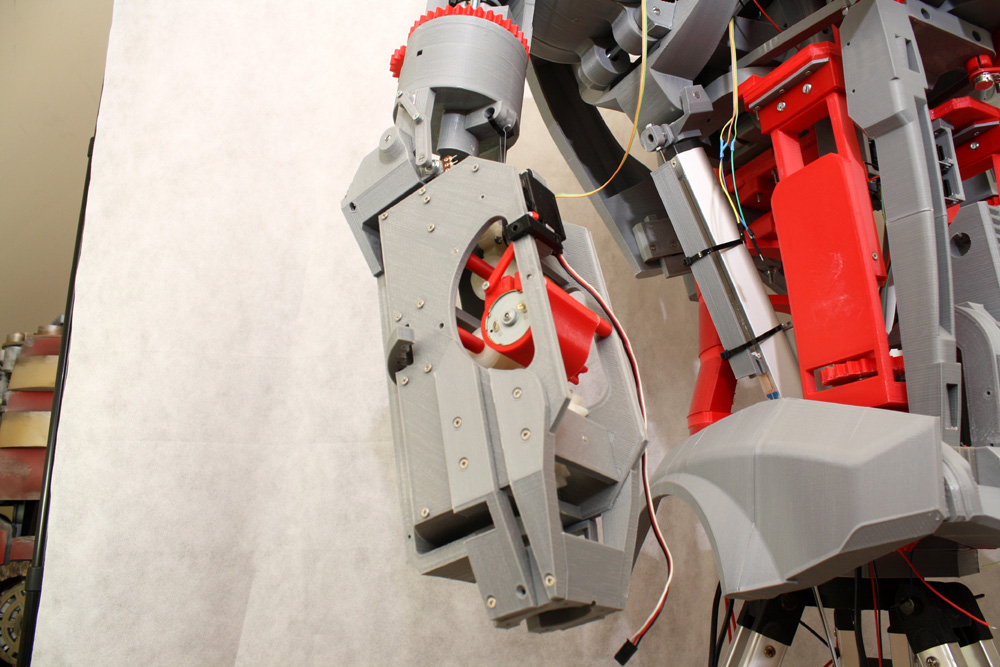
I designed the elbow mounting to be as compact as possible, this leaves the arms just the right proportion for the rest of the robot:

The elbow hinge works pretty well keeping the pulley and string central. The arm rotates on its own track also, the front pulley is spare to operate the hand:
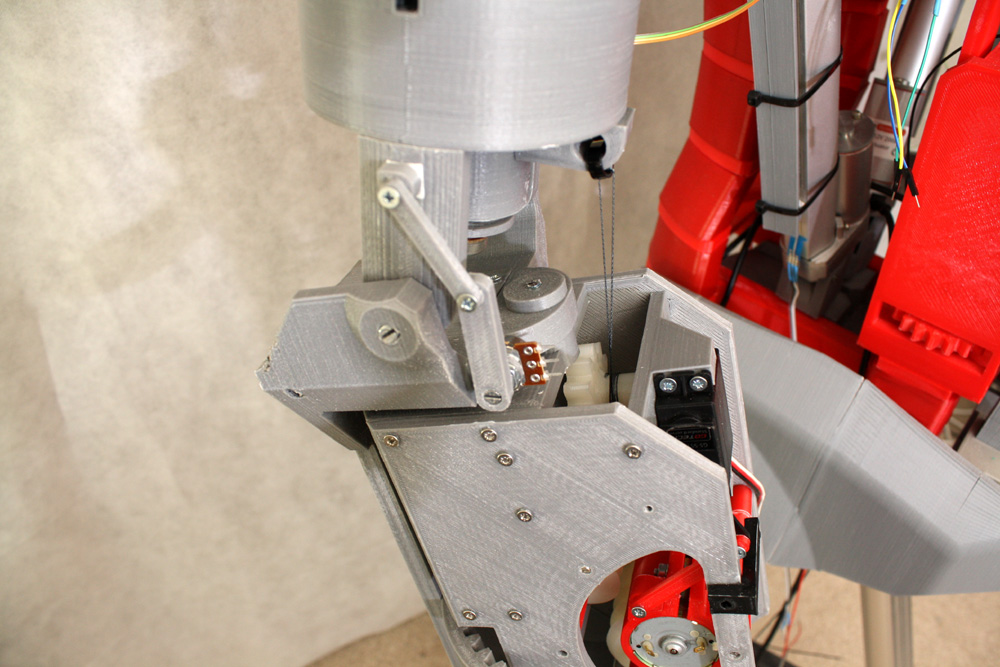
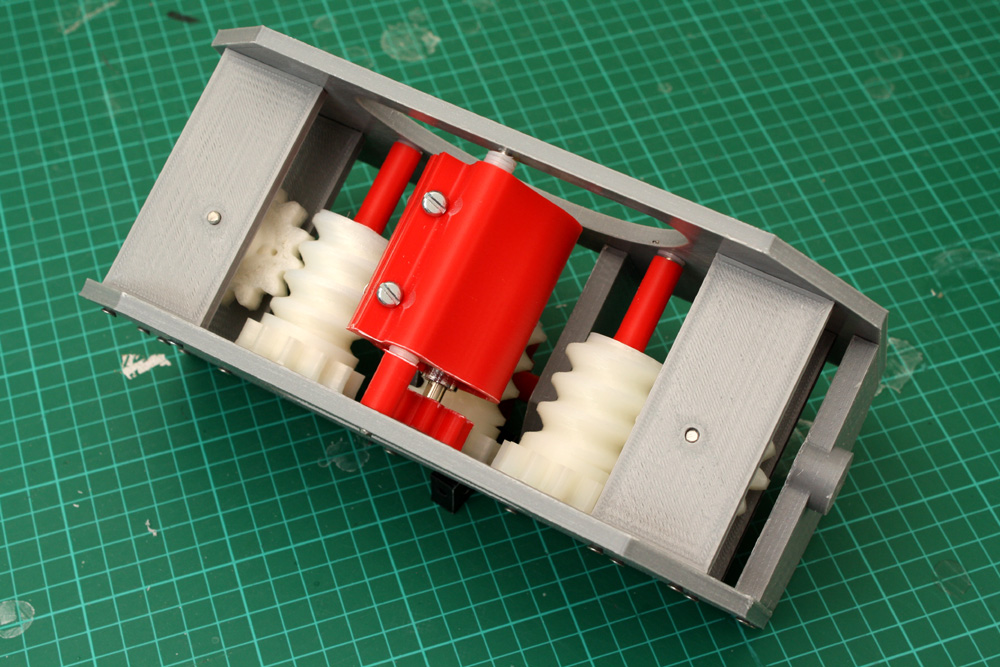
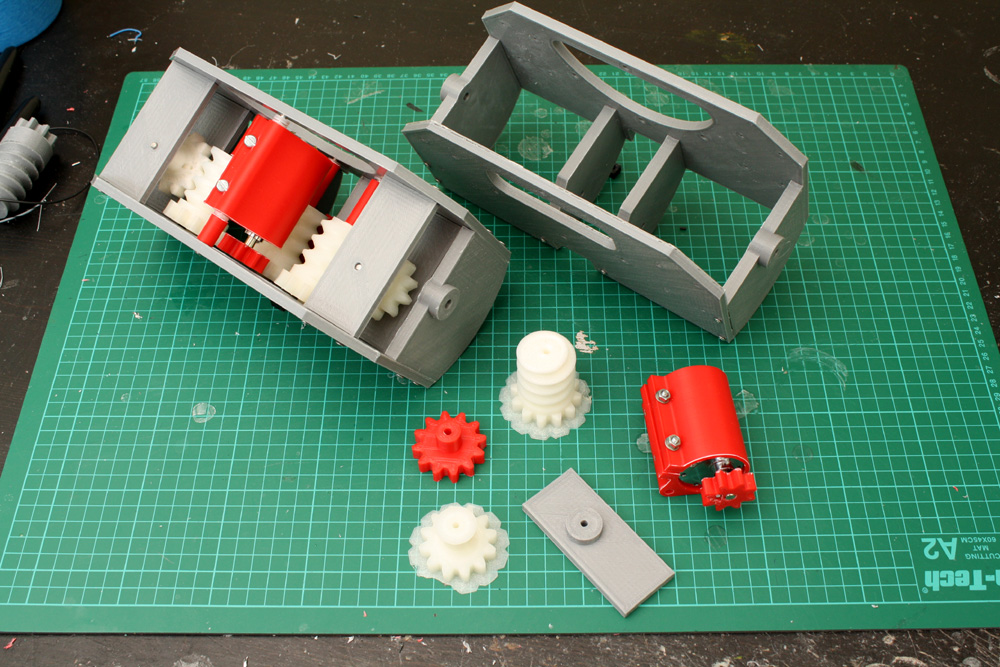
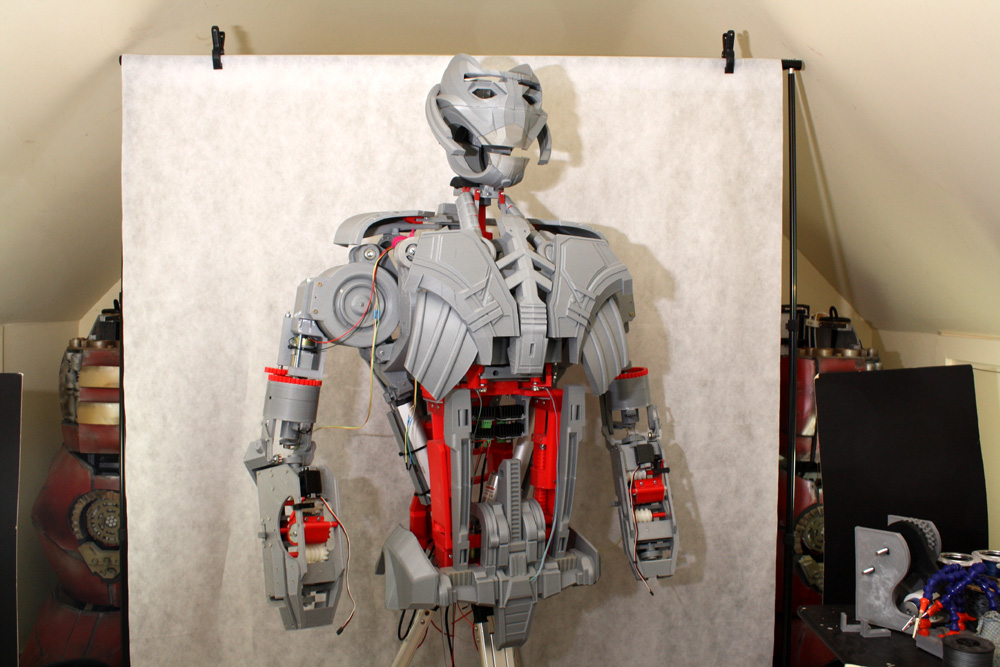
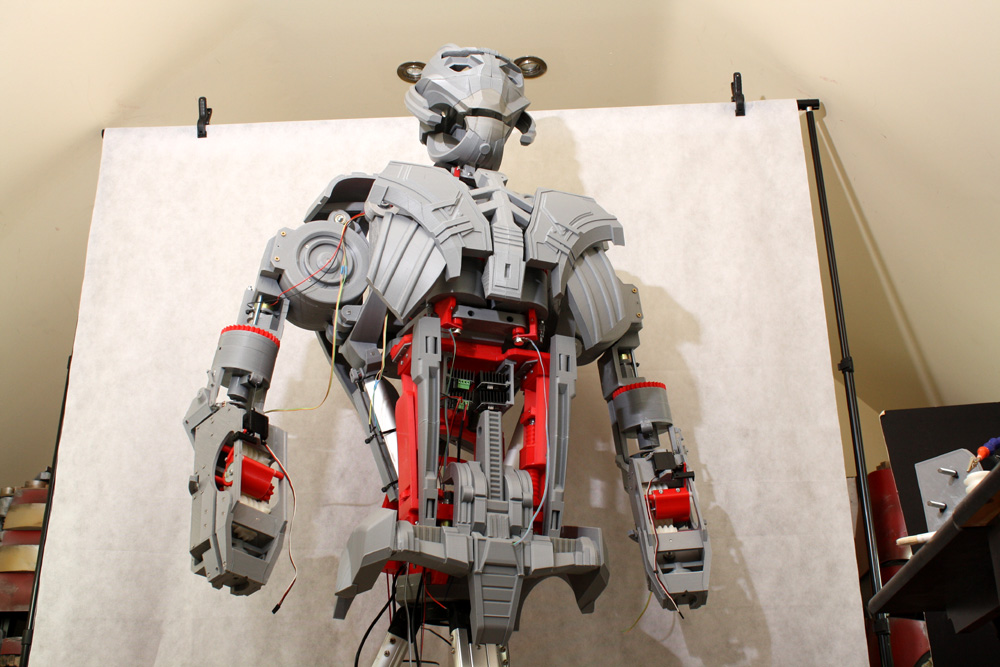
Some pictures of it all in one piece. There are plenty more cosmetics parts to go however…

Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More